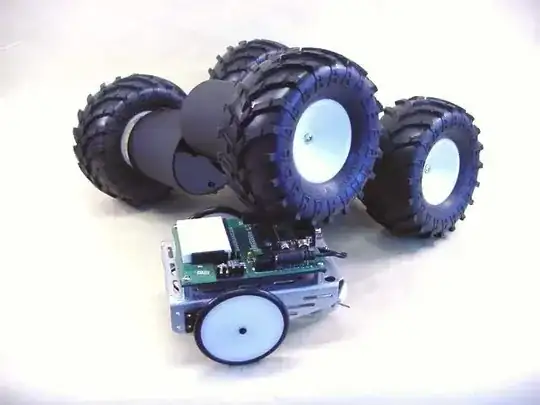
I once tried to make a 4 wheeled Lego robot using a pivot arm suspension system. The robot was motorized using 2 Mindstorm (2.0) motors (one one each side). I can't find and original picture but it looked like this big black one:
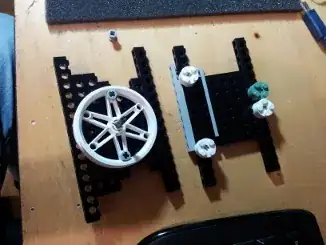
I used a Lego Technic turntable as the single point of rotation between the two robot sides bu the robot sagged a lot and there was so much pressure on that piece that it would not rotate well.

Q: How would you build a 4 wheels rover pivot arm suspension system? Considering that it needs to be motorized thus adding the weight of two motors.
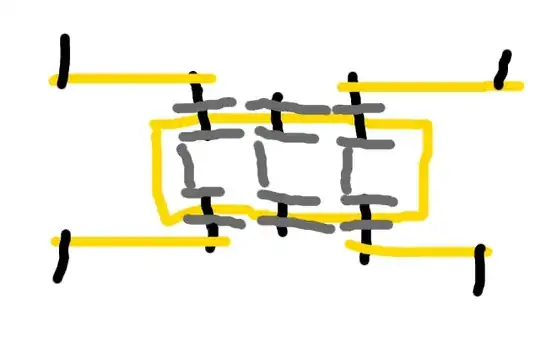
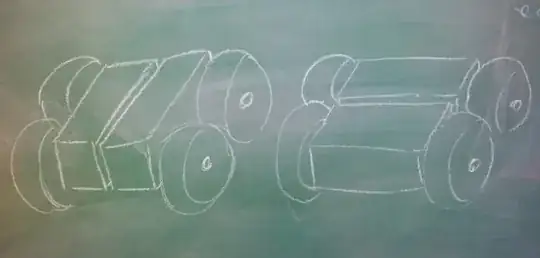
Note: The pivot arm design can be one of those two:
Edit 1: To give an idea of the size, I'm using this Technic wheels. The final model is about 20cm long and 20cm wide.


 ), on which you first slide 3 regular
), on which you first slide 3 regular  ) which will be attached to one half of your model, then 5
) which will be attached to one half of your model, then 5  ) which will be attached to the other. Maybe the strain on the axle will be too much (I read it's
) which will be attached to the other. Maybe the strain on the axle will be too much (I read it's